^^Bivettore, area; cambiamento di coordinate.
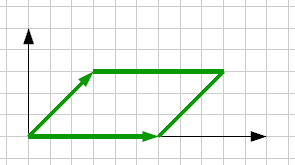
Qui vogliamo calcolare l'area del bivettore con quest'idea:
| Caso semplice |
|
Caso qualsiasi |
 1°vt collineare al
1°vt base |
|
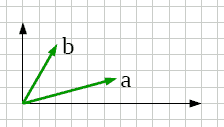 vt in posizione
qualsiasi |
- calcolare l'area nel caso semplice
- per calcolare l'area nel caso qualsiasi:
cambiare il sistema di riferimento, portando il caso
qualsiasi nel caso semplice
Ambiente
- spazio vettoriale R²
- base ortonormale u1 u2
- 2 vettori: a e b
- a= a1u1 + a2u2 ≡
(a1,a2)
- b= b1u1 + b2u2 ≡
(b1,b2)
- a∧b bivettore
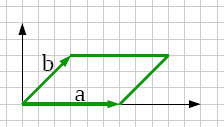
Situazione semplice
- a∧b ha il 1°vt colineare al 1°vt base
cioe': a= a1u1 + 0u2
di conseguenza: formula semplice
A = a1b2 e' l'area orientata del bivettore.
Per calcolare l'area del bvt in una posizione qualsiasi:
- ruotare il riferimento per collineare il 1°vtbase col 1°vt del bvt
- calcolare il cambiamento di coordinate
- applicare la sempice formula a1b2 con le nuove
coordinate.
Ricordo
- Cambiamento di coordinate
dovuto ad una rotazione.
- Matrice di rotazione.
- Matrice di una
trasformazione lineare.
Nelle nuove coordinate
- base ortonormale u1' u2'
- a= a1'u1' + a2'u2'
- b= b1'u1' + b2'u2'
Per definizione-costruzione
- a∧b ha il 1°vt, colineare al 1°vt base
- a2' = 0
- (1) a1' = |a| = √(a1² + a2²)
Cio' evita di calcolare a1' con la matrice.
Resta da calc b2'
(2) b2' = -(senβ)b1 + (cosβ)b2
| (3) |
cosβ = a1/|a| senβ = a2/|a| |
(4) b2' = (-a2b1 + a1b2)/|a|
sostituisco (3) in (2)
A= a1'b2' = |a|*(-a2b1 + a1b2)/|a|
= -a2b1 + a1b2 = a1b2 -
a2b1
Caso del prodotto scalare
Per definizione-costruzione
- a·b ha il 1°vt, collineare al 1°vt base
- a2' = 0
- (1) a1' = |a| = √(a1² + a2²)
Cio' evita di calcolare a1' con la matrice.
Resta da calc b1'
(2) b1' = (cosβ)b1 + (senβ)b2
| (3) |
cosβ = a1/|a| senβ = a2/|a| |
(4) b1' = (a1b1 + a2b2)/|a|
sostituisco (3) in (2)
a·b = a1'b1' = |a|*(a1b1 + a2b2)/|a|
= a1b1 + a2b2
Approfond
Come cambia quest'espressione al cambiare del riferimento?
A = a1b2 e' l'area orientata del bivettore
nella situazione semplice.
Per chiarezza meglio mettere le lettere
Talk
Penso che questo sia il modo piu' profondo di pensare al bivettore, e quindi
la sua comprensione, a posteriori della genesi storica.
1 o 2 elle ?
wp/Collinearità
fr: colinéaires